基本机构设计
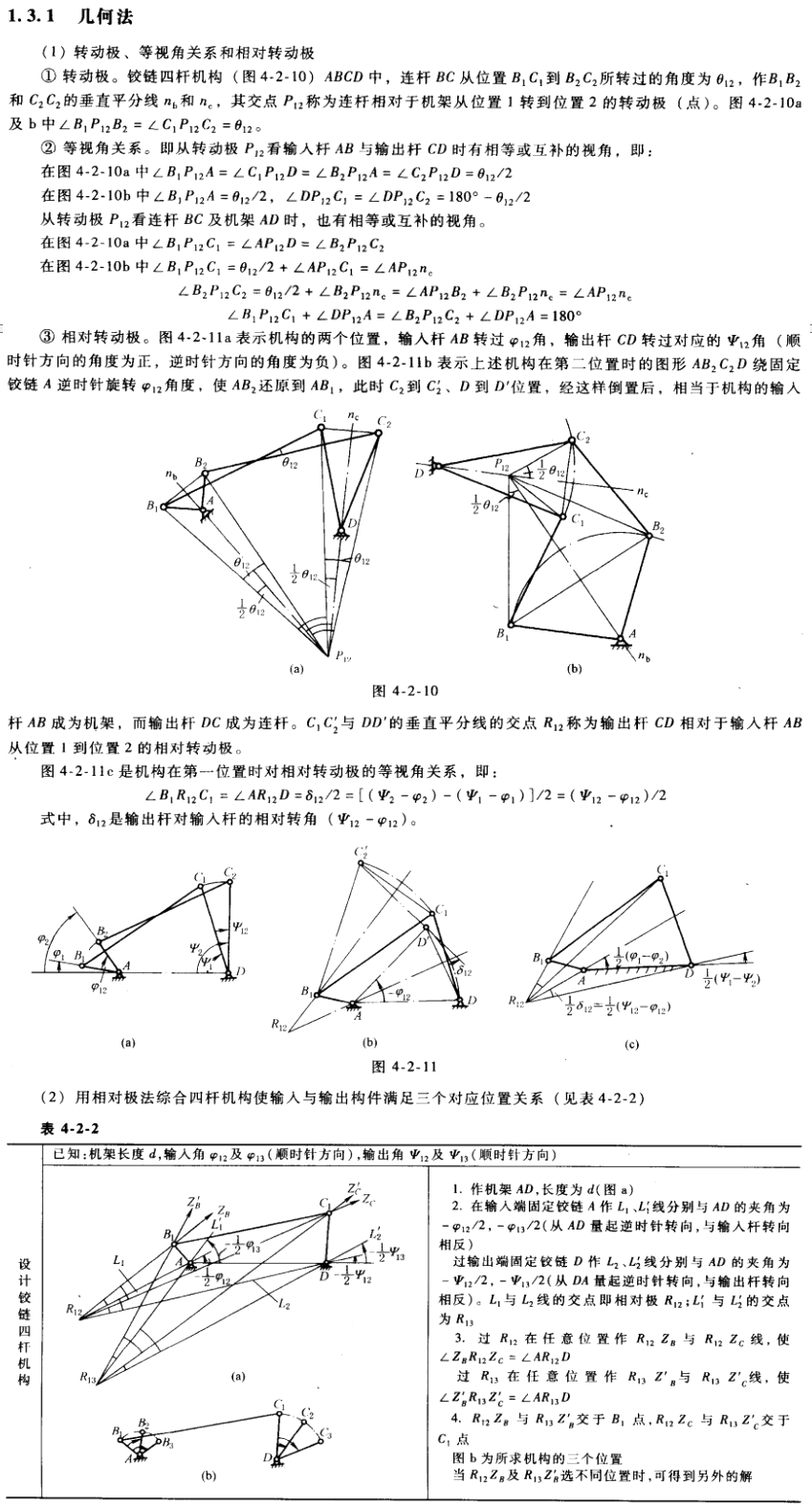
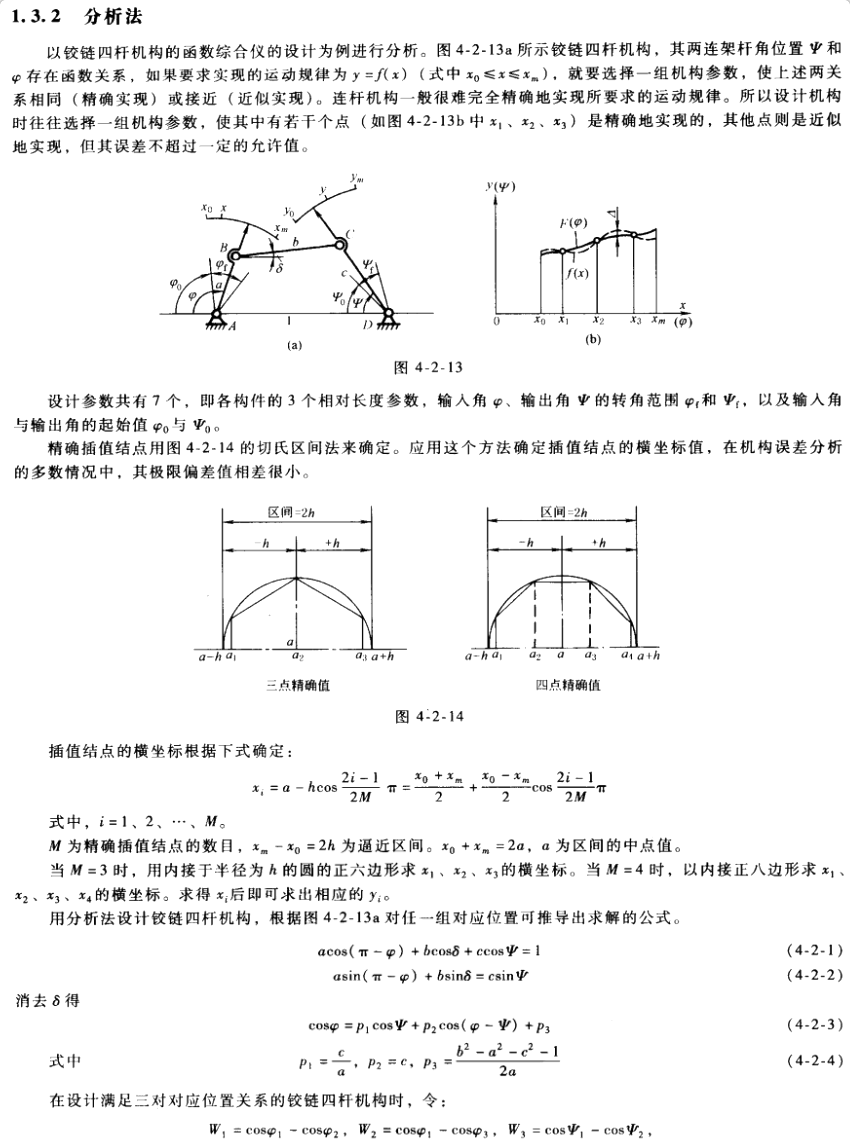
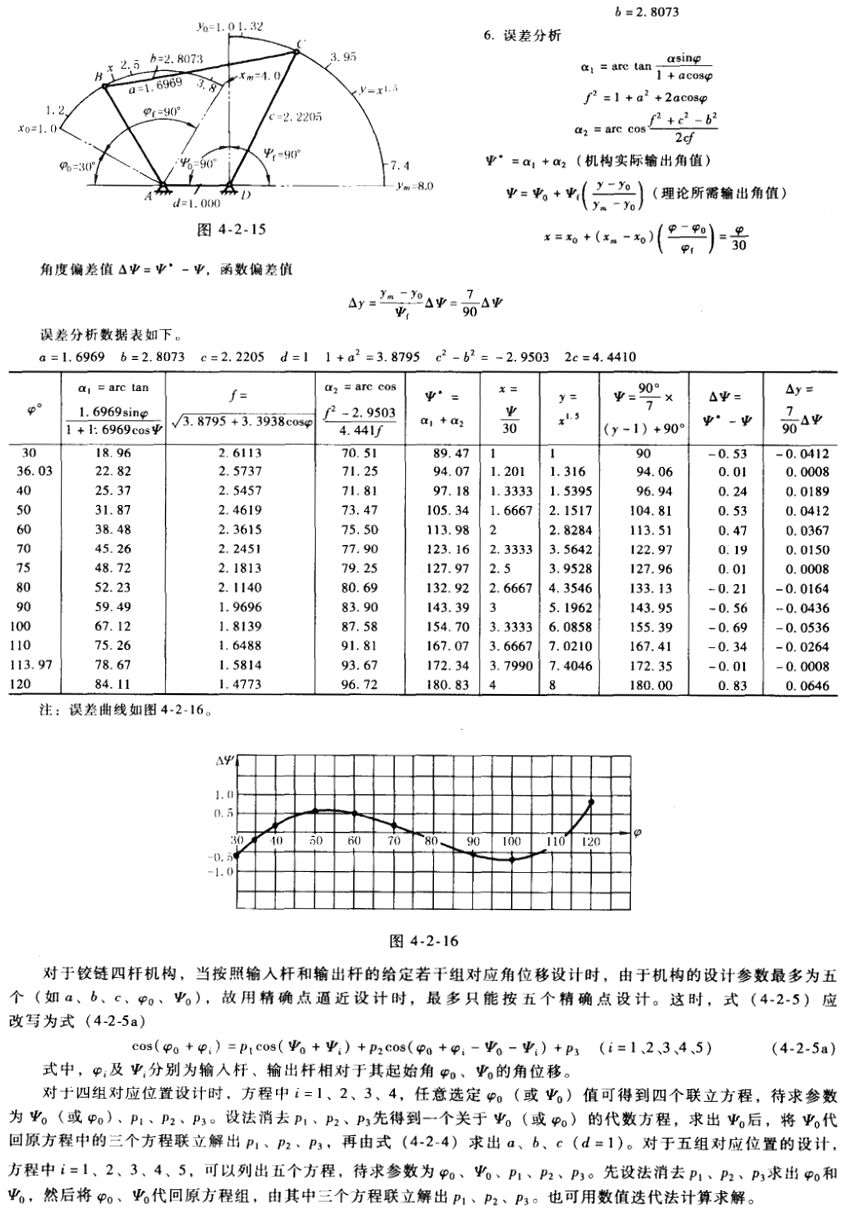
按输出杆与输入杆的位置关系设计连杆机构,可采用几何法、分析法和实验法。几何法比较简便,在一般设计中采用较多,但它只能求解输入杆和输出杆的某几个有限位置的对应关系,精度不如分析法高;分析法则可在一定的范围内通近给定的运动规律,精度较高,并可求出所求运动与实际运动的偏差(四连杆机构不可能完全准确地完成任意给定的运动规律),但计算较复杂;实验法是通过作图试凑选择机构的基本尺寸,精度低,用于近似设计和机构尺寸的预选。
文依
精稳工业
Schneider·施耐德
霹雳马
convum·妙德
EMERSON·艾默生(AFAG)
EPSON·爱普生
Swgelok·世伟洛克
teco·东元电机
ABBA·国际直线科技
DENSO·电装机器人
西科标识
回顶部
微信扫码分享